Projektowanie Wspólnej Masy w Układach Cyfrowych i Mieszanych: Teoria, Problemy i Praktyka
Streszczenie
Projektowanie układów cyfrowych i mieszanych niesie ze sobą szereg wyzwań związanych z właściwym uziemieniem. Szczególne znaczenie ma dobór i konfiguracja wspólnej masy dla różnych typów referencji napięć: masy analogowej (AGND), cyfrowej (DGND) oraz masy mocy (PGND). Nieprawidłowa architektura masy może skutkować pętlami masy, zakłóceniami elektromagnetycznymi (EMI), ground bounce i znaczącym pogorszeniem parametrów przetworników analogowo-cyfrowych. Artykuł przedstawia kluczowe zasady projektowe, typowe błędy oraz rekomendacje dotyczące prowadzenia masy w układach z mikrokontrolerami, przetwornikami ADC/DAC i modułami zasilania impulsowego.
1. Wprowadzenie
W układach elektronicznych masa jest odniesieniem napięć oraz ścieżką powrotu prądu. W systemach cyfrowych i mieszanych konieczne jest często rozróżnienie kilku typów mas: analogowej (AGND), cyfrowej (DGND) i masy mocy (PGND). Ich właściwe zaprojektowanie i integracja w jednej architekturze decydują o stabilności układu, jakości sygnału i odporności na zakłócenia.
2. Rodzaje mas i ich funkcje
- AGND (masa analogowa): Odniesienie dla precyzyjnych sygnałów analogowych. Wymaga niskoszumowego środowiska.
- DGND (masa cyfrowa): Uziemienie dla logiki cyfrowej, z dużymi impulsami przełączającymi.
- PGND (masa mocy): Masa obwodów dużej mocy, np. przetwornic DC/DC, silników.
Każda z mas obsługuje inny rodzaj sygnałów i obciążenia, co implikuje różne wymagania projektowe.
3. Zasady projektowe wspólnej masy
3.1. Jednolita płaszczyzna masy
Zalecane jest stosowanie jednej, ciągłej płaszczyzny masy na warstwie wewnętrznej PCB. Minimalizuje to impedancję ścieżek powrotnych oraz pole pętli, co istotnie ogranicza emisję EMI.
3.2. Podział obszarów i punkt gwiaździsty
W projektach mieszanych stosuje się fizyczną separację obszarów analogowego i cyfrowego na PCB, z połączeniem ich w jednym punkcie odniesienia (star ground). Punkt ten powinien być miejscem zbiegu wszystkich mas oraz głównego zasilania.
3.3. Zasady łączenia AGND/DGND
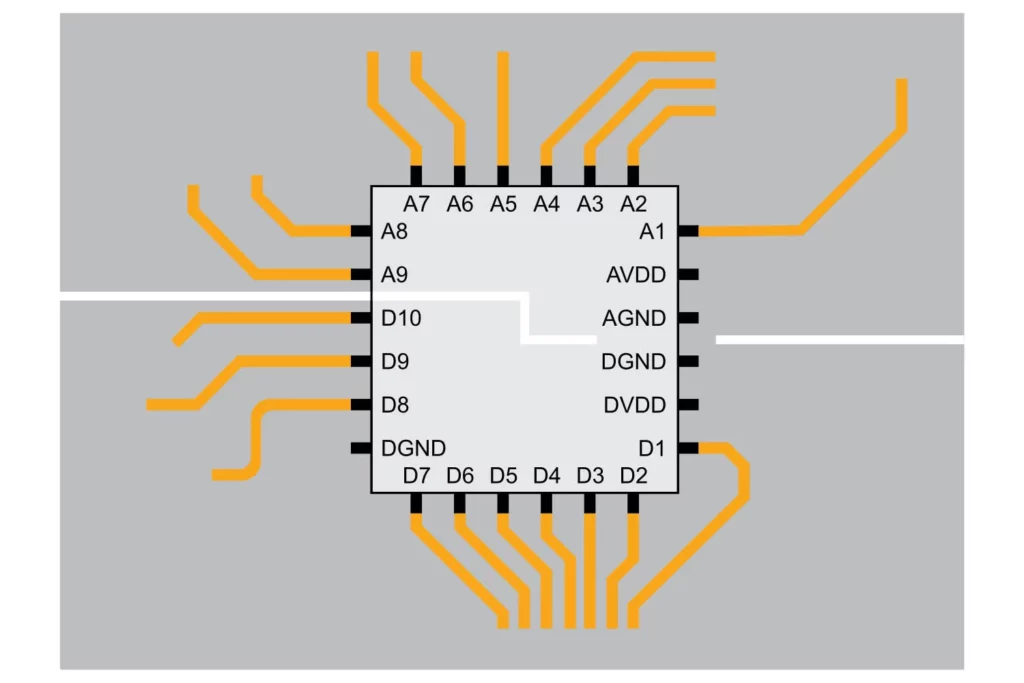
Piny AGND i DGND układów mieszanych (np. ADC/DAC) powinny być prowadzone do wspólnej płaszczyzny masy analogowej, zgodnie z zaleceniami producenta. Błędne rozdzielenie prowadzi do błędów przetwarzania sygnału.
4. Typowe problemy projektow
4.1. Pętle masy
Pętle powstające przy wielokrotnych połączeniach masy prowadzą do powstawania zakłóceń indukowanych przez zmienne pole magnetyczne. Ich obecność skutkuje interferencją i emisją EMI.
4.2. Ground bounce
Wysokie prądy przełączające w torach cyfrowych powodują chwilowe różnice potencjału masy, co zakłóca działanie układów analogowych. Problem ten jest szczególnie istotny przy przetwornikach ADC.
4.3. Zakłócenia ADC i DAC
Oddzielenie masy cyfrowej i analogowej w układach ADC/DAC prowadzi do niestabilnych napięć odniesienia. W skrajnych przypadkach powoduje to zniekształcenia lub błędne pomiary.
5. Prowadzenie masy na PCB
- Minimalizacja impedancji: Prowadzenie ścieżek masowych powinno być jak najkrótsze i jak najszersze.
- Unikanie podziałów: Unikać cięć w płaszczyźnie masy; jeśli konieczne, stosować mostki masowe.
- Przelotki: Należy stosować stitching vias łączące warstwy masy.
- Odsprzęganie: Kondensatory odsprzęgające muszą być umieszczone bezpośrednio przy pinach zasilania i masy.
6. Rola masy w układach scalonych
6.1. Mikrokontrolery
Wbudowane przetworniki ADC wymagają stabilnego odniesienia masy. Masa dla sekcji analogowej (AVCC/AREF) powinna być prowadzona oddzielnie od masy cyfrowej i połączona w punkcie centralnym.
6.2. Układy ADC/DAC
Połączenia AGND i DGND powinny być prowadzone razem, najlepiej bezpośrednio do jednej płaszczyzny masy analogowej. Rekomendowane jest stosowanie jednej płaszczyzny masy dla sygnałów analogowych i cyfrowych, z fizyczną separacją na PCB.
6.3. Moduły zasilania impulsowego
PGND i AGND powinny być połączone jak najbliżej układu, często przy pinach układu lub przez filtr. Pozwala to ograniczyć szumy przenikające między sekcjami.
7. Separacja i filtrowanie mas
W układach o dużym poziomie zakłóceń stosuje się separację masy przez:
- Ferrytowe koraliki – tłumienie zakłóceń HF,
- Dławiki – separacja zakłóceń mocy,
- Rezystory 0 Ω – jako połączenie mas z możliwością pomiaru lub szybkiej zmiany topologii,
- Kondensatory między masami – dla prądów zmiennych.
8. Podsumowanie
Poprawne prowadzenie masy w układach cyfrowych i mieszanych wymaga uwzględnienia charakteru przepływu prądów powrotnych, separacji obszarów funkcjonalnych oraz zastosowania zasad punktu gwiaździstego. Nieprzestrzeganie tych zasad skutkuje błędami pomiarowymi, niestabilnością układu i przekroczeniem norm EMC. Wysoka jakość projektu PCB i znajomość zasad zarządzania masą stanowią klucz do stabilnej pracy systemów embedded, audio, przemysłowych i telekomunikacyjnych.